在线客服
在线客服
 企业微信
企业微信






 [VIP第5年] 指数:1
[VIP第5年] 指数:1 通过认证
通过认证 
校准机器人零点位置的具体方法
注:需要点击操作的地方都做了浅红色标记
第1步:选择手动操纵 (参看图1,首先把钥匙开关打到手动位置)
方法: 1> 点击 ABB 2> 点击 手动操纵
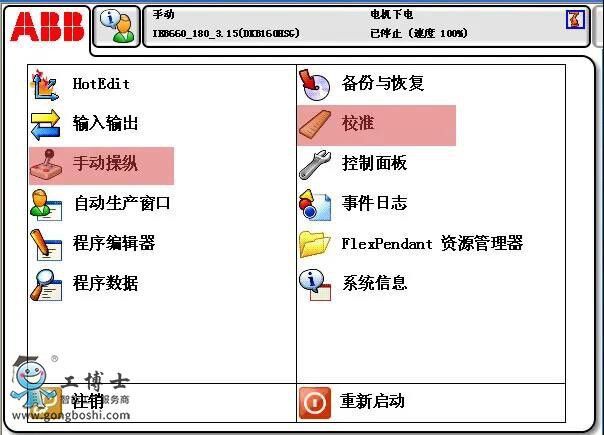
第2步:选择动作模式 (参看 图2 和 图3)
方法: 1> 点击 动作模式 2> 点击 轴1 - 3 或者 轴4 - 6
3> 点击 确定

第3步:选择工具坐标 (参看 图2 和 图4)
方法: 1> 点击 工具坐标 2> 点击 tGripper 3> 点击 确定

第4步:选择移动速度 (参看 图2 和 图5)
方法: 1> 点击 增量 2> 点击 中 或者 小 3> 点击 确定
第5步:手动移动机器人各轴到机械零点位置 (参看 图2)
方法: 此时图2上 操纵杆方向 处显示操纵杆移动方向于轴的对应关系
注意:
如果先前选择 轴1 - 3 则
1> 操纵杆上下移动为2轴动作
2> 操纵杆左右移动为1轴动作
3> 操纵杆顺/逆时针旋转为3轴动作
如果先前选择 轴4 - 6 则
1> 操纵杆上下移动为5轴动作
2> 操纵杆左右移动为4轴动作
3> 操纵杆顺/逆时针旋转为6轴动作
1> 左手持示教器,四指握住示教器使能开关(在示教器下方黑色胶皮里面)
2> 右手向**一个方向轻轻移动操纵杆,把各轴按顺序移动到各自机械**零点
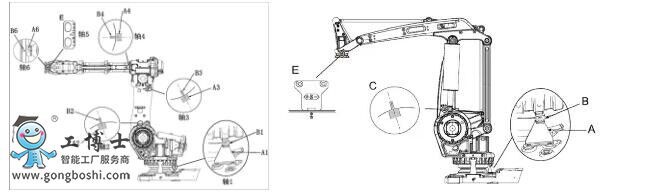
移动顺序,依次为6轴→5轴→4轴→3轴→2轴→1轴,否则会使4,5,6轴升高以致于看不到零点位置。
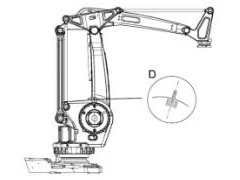
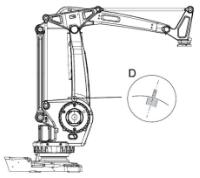
机械零点位置如图6所示,当所有六个轴全部对准机械零点位置以后,机器人的姿态正如图6所示。
第6步:更新转数计数器 (参看图1,此时可以示教器使能开关)
方法: 1> 点击 ABB 2> 点击 校准 3> 点击 ROB_1 (参看图7)

4> 点击 转数计数器 (参看图8)
5> 点击 更新转数计数器… (会弹出一个警告界面)
6> 点击 是
7> 点选 显示转数计数器未更新 所有轴,显示转数计数器已更新的轴不用选择(参看图9)8> 点击 更新 (会弹出一个警告界面 如图10)

9> 点击 更新 (会弹出一个进度窗口 然后等待)
显示更新以后的状态如图11所示

10> 点击 关闭 (更新完毕)

第7步:重新启动机器人方法: 1> 点击 ABB 2> 点击 重新启动 3> 点击 热启
在此处联系我们或致电与我们联系!以获取有关ABB机器人配件和解决方案的快速简便的报价:http://abbpeijian-gyrobot.gongboshi.com/
了解更多ABB机器人维修、ABB机器人保养 请咨询:ABB机器人配件服务商