
 在线客服
在线客服
 企业微信
企业微信






 [VIP第5年] 指数:1
[VIP第5年] 指数:1 通过认证
通过认证 
ABB机器人的队列函数与基于视觉的输送链随机抓取
肺炎期间,口罩的需求不断升级。在实际生产口罩时,来料的位置很可能是随机的,加工方法自然是在输送链上增加一个摄像头,捕捉产品位置偏差,通知机器人纠正。

默认位置固定的输送器得到的产品,如何生成随机效应上面的图像?
1、组件可通过智能来完成。可以增加LineSensor起点传送带附近,产品的诱导,纠正定位部件的位置。其中,从一个随机定位产生的位置误差组件随机的,下面具体地提供。
2、矢量分量向量中XYZ的单位为mm,输入接受的单位为m,矢量分量向量中ABC角的单位为度,接受的输入角的单位为弧度。
3、调整完成后,将产品的新位置通知的机器人(组件由RapidVariable),模拟摄像机识别后便于模拟,该产品的位置,这完成生产的输送机链条产品的随机位置。
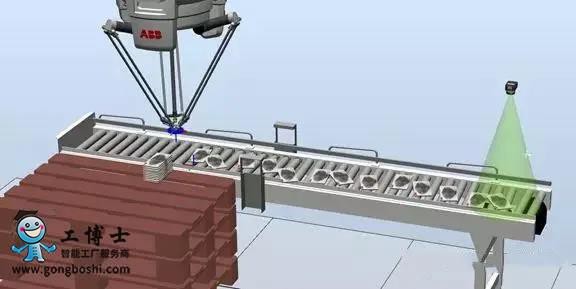
由于上面的相机位置远离机器人的实际跟踪抓取位置,需要记录相机给出的坐标。当机器人提取坐标时,它总是提取组数据。完成以上数据,需要队列队列功能,不幸的是,ABB机器人RAPID默认不提供队列功能。
队列可以被配置为其自身的功能,这意味着队列:把数据插入到每个队列后,每个数据阵列,以提取前面的数据,而需要向前或向后逐步提取随后的数据。
PROCInsertQueue(pos pos1)
Q_Last No:= Q_Last No 1;
q_pos{q_LastNo}:=pos1;
ENDPROC
PROCClearQueue()
FOR i FROM 1 TO 100 DO
q_pos {I}: = [0,0,0];
ENDFOR
q_LastNo:=0;
ENDPROC
FUNC posGetQueue()
VAR pospos_result;
VAR pospos_tmp {100};
IFq_LastNo=0 THEN
Return [-999,-999,-999];
ELSEIFq_LastNo=1 THEN
pos_result: = q_pos {1};
q_LastNo:=0;
Q_pos {1}:=[0,0,0];
ELSE
pos_tmp: = q_pos;
pos_result: = q_pos {1};
Q_pos {Q_Last No }:=[0,0,0];
q_LastNo: = q_LastNo-1;
FOR i FROM 1 TOq_LastNo DO
q_pos{i}:=pos_tmp{i1};
ENDFOR
ENDIF
RETURNpos_result;
ENDFUNC
机器人摄像机记录的输出数据可被存储在队列中完成,并且数据是通过中断信号触发。
TRAPtr_getdata
p_test.z:= p_test.z/1000;
Insert queue p_test;
ENDTRAP
由于所接收的数据是X,Y和R z,RZ弧度,ABB机器人用途四元数角计算,特别是这样当机器人的轨道修正,角度需要orientzyx成四元数的函数,并分配给wobj的o
PROC calwobj()
wobj_cnv1.o
Wobj_cnv1.o
ENDPROC
在此处联系我们或致电与我们联系,以获取有关ABB机器人配件和解决方案的快速简便的报价:http://abbpeijian-gyrobot.gongboshi.com/
了解更多ABB机器人维修、ABB机器人保养 请咨询:ABB机器人配件服务商










