在线客服
在线客服
 企业微信
企业微信









 [VIP第2年] 指数:4
[VIP第2年] 指数:4 通过认证
通过认证 
ABB机器人661-2 Force Control Base力控功能
功能:力控功能 需要配合力控传感器装置 力传感器可安装在机器人法兰盘处或者固定安装 示例:不规则工件的打磨抛光;装配应用
自动化技术是全球竞争的关键所在。不仅只对于企业自身的生产效率,对于企业自身的产品来说也是如此。为了不断开发新的应用领域,开拓新的目标和行业,企业 往往需要用到智能型技术解决方案。例如智能机器人,它可以识别诸如力和动作等性能,也能顾及其功效,还能从语言指令中,自动生成程序。这些特性旨在提高加 工质量、生产效率和设备的利用率。
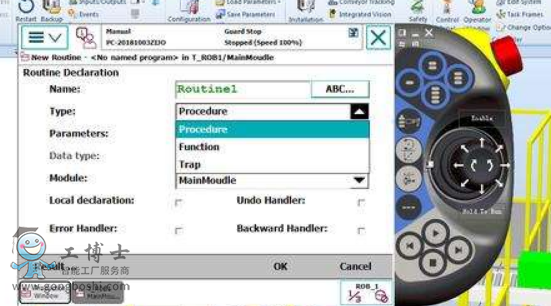
Flex-Pendant手动图形操作仪可以使用户在无编程知识的情况下,对ABB机器人进行简单编程
通 常情况下,编程或指令都是由编程人员或操作人员向机器人下达的。这种工艺流程往往比较耗费人力物力,尤其是在时间耗费上。鉴于此,机器人需要“学会”路 径、动作、力和极限值这些概念。在经过反复的试验之后,机器人可以以很高的精度任意重复所掌握的流程和数值,这足以应对静态的任务。但是,实际生产中也有 很多针对动态或变化着的边缘条件和流程。在简单的机械加工场合中,有可能出现编程路径的尺寸偏差或障碍,而在连续性的检验过程中,这可能是由不断变化着的 阻力或材料的弹性引起的。针对这些现实情况,ABB公司研发出了柔性精加工解决方案(FC)(图1)。这些方案基于集成在机器人手上的精密的传感元件和特 殊的软件来工作,传感器对10N的力的变化都会有所反应,由此即可实现一些重要的功能和用途。
ABB力控机器人,无需编程
图1 Force Control Machining(力控制加工)功能用于对任意工件进行简单可编程和机器人辅助的加工
ABB机器人自我编程
“Lead Through Teaching——通过教育引导”的软件功能可以为用户提供路径简单的编程支持。与传统的费时费力的编程过程相 反,Flex-Pendant手动操作仪和软件可以减轻用户的工作量。通过图形用户界面,用户只需少许的鼠标点击,即可达到目的。由此,他只需用手把机器 人引向大致的后续工作位置,并输入此工作位。对于此类少量的输入,依据部件的具体情况,可允许有几个毫米的误差。接着,机器人触遍部件的轮廓,并通过 Automatic Path Learning(自动路径学习)功能掌握所需的位置。由此,即使在相当短的时间内,复杂的路径也可迅速完成,而费时费力 的编程工作即可被省去。显而易见的是:工件越复杂,则软件的能效就越强。由此可以节省下高达90%的编程时间,整体设备的效益可得到极大的提高,制造厂家 可对客户的要求做出更快和更灵活的反应。
在加工过程中,FC Pressure功能用于维持恒定的压靠力(直角对着路径),使得刀具以一个恒定的压力压向工件的表面。设定值和极限值依据工艺流程 和材料而定,如自动磨削,对铸件和毛刺的铣削与镗削,对木质工件的磨削或对木与塑料复合材料或其他材料的磨削。在每一个加工阶段,软件都可测得力的实际 值,并把实际值与额定值进行均衡,同时在必要时也对给定的路径进行改编。由此可以确保刀具总是沿着工件表面行走,而不受工件外形凹凸不平、加工公差或进刀 过深的影响。FC Pressure功能还可以降低工件表面受损的风险,并对刀具的磨损状态做出预诊断。
ABB机器人适应加工速度
FC Speed-Change功能通过更改机器人轨迹速度,来实现在加工过程中对材料的恒定速度切削。加工过程一旦出现过高的加工阻力,软件就会自动降 低机器人手的进给速度并使加工的力保持恒定。此外,机器人还可以通过这种方式防止工件或刀具因机械载荷或热载荷过大而受损。这种*优化的机器人加工速度控 制降低了的工件和刀具损伤风险,特别是增强了流程安全性,这些使得生产效率和整个加工过程的经济效益得到了极大的提高。
ABB力控机器人,无需编程
图2 常规加工和技术方案的*重要原则与FC机加工的*重要原则的对比
在ABB这一技术基础上,Magna International公司的子公司ACTS研发出一种全新的车座检测系统。检测对象是在测试过程中会因载荷的 不同而发生变化的座椅(坐垫的夹持力和弹性逐步减弱)。常规配置的机器人在此处会出现重复作业,即沿着给定的动作轨迹行走,同时测量所获得的力。在每个循 环之后,它会把实际值与额定值进行均衡,并纠正轨迹,以用于下一个作业循环。由此连续几个作业循环,直至额定值重新达到为止。
而Frits(Force-controlled robotic intelligent test system力控机器人智能检测系统)的情况则不 同。机器人在移动载荷物的同时进行力的调节,从而使载荷物总是按照额定值进行加载。在连续试验中,载荷物非常准确也很接近现实地模拟人的重复上下车动作, 由此可得出在现实条件下的疲劳和磨损状况(图3)。
ABB力控机器人,无需编程
ABB机器人采用Frits来模拟入座时的复杂动作过程。所获得的数据可以对长期状态做出客观的表述
材料疲劳或材料失灵的测量值也可在“力-行程”曲线上反映出来,检测者可以得出有关座椅舒适度及其变化的可靠结论。由于有了自动路径学习功能,检测者在新 的测试或新的任务中,也会得益于很短的编程过程。新的测试系统的应用场合几乎不受限制,例如力矩调节的车辆元件在安装状态下(如座椅、车门、顶板、方向盘 等)的连续运行检测只是可能的众多检测项目中的一项。另一方面是对调节装置、开启装置和关闭装置(如门把手、档位和方向盘)的操作力的测量。适用于汽车领 域的方面,也可转用到航空、船舶或通用机器制造直至对电器设备活动部件的检测上。对此,检测系统会帮助用户对检测序列进行直接记录。另一方面,已编程完毕 的检测流程及其检测坐标可以一次性被存储,由此可以极大降低后续试验所需的换装和编程等费用。
更多ABB机器人技术支持请点击:http://abb_robots.gongboshi.com/
Flex-Pendant手动图形操作仪可以使用户在无编程知识的情况下,对ABB机器人进行简单编程
通 常情况下,编程或指令都是由编程人员或操作人员向机器人下达的。这种工艺流程往往比较耗费人力物力,尤其是在时间耗费上。鉴于此,机器人需要“学会”路 径、动作、力和极限值这些概念。在经过反复的试验之后,机器人可以以很高的精度任意重复所掌握的流程和数值,这足以应对静态的任务。但是,实际生产中也有 很多针对动态或变化着的边缘条件和流程。在简单的机械加工场合中,有可能出现编程路径的尺寸偏差或障碍,而在连续性的检验过程中,这可能是由不断变化着的 阻力或材料的弹性引起的。针对这些现实情况,ABB公司研发出了柔性精加工解决方案(FC)(图1)。这些方案基于集成在机器人手上的精密的传感元件和特 殊的软件来工作,传感器对10N的力的变化都会有所反应,由此即可实现一些重要的功能和用途。
ABB力控机器人,无需编程
图1 Force Control Machining(力控制加工)功能用于对任意工件进行简单可编程和机器人辅助的加工
ABB机器人自我编程
“Lead Through Teaching——通过教育引导”的软件功能可以为用户提供路径简单的编程支持。与传统的费时费力的编程过程相 反,Flex-Pendant手动操作仪和软件可以减轻用户的工作量。通过图形用户界面,用户只需少许的鼠标点击,即可达到目的。由此,他只需用手把机器 人引向大致的后续工作位置,并输入此工作位。对于此类少量的输入,依据部件的具体情况,可允许有几个毫米的误差。接着,机器人触遍部件的轮廓,并通过 Automatic Path Learning(自动路径学习)功能掌握所需的位置。由此,即使在相当短的时间内,复杂的路径也可迅速完成,而费时费力 的编程工作即可被省去。显而易见的是:工件越复杂,则软件的能效就越强。由此可以节省下高达90%的编程时间,整体设备的效益可得到极大的提高,制造厂家 可对客户的要求做出更快和更灵活的反应。
在加工过程中,FC Pressure功能用于维持恒定的压靠力(直角对着路径),使得刀具以一个恒定的压力压向工件的表面。设定值和极限值依据工艺流程 和材料而定,如自动磨削,对铸件和毛刺的铣削与镗削,对木质工件的磨削或对木与塑料复合材料或其他材料的磨削。在每一个加工阶段,软件都可测得力的实际 值,并把实际值与额定值进行均衡,同时在必要时也对给定的路径进行改编。由此可以确保刀具总是沿着工件表面行走,而不受工件外形凹凸不平、加工公差或进刀 过深的影响。FC Pressure功能还可以降低工件表面受损的风险,并对刀具的磨损状态做出预诊断。
ABB机器人适应加工速度
FC Speed-Change功能通过更改机器人轨迹速度,来实现在加工过程中对材料的恒定速度切削。加工过程一旦出现过高的加工阻力,软件就会自动降 低机器人手的进给速度并使加工的力保持恒定。此外,机器人还可以通过这种方式防止工件或刀具因机械载荷或热载荷过大而受损。这种*优化的机器人加工速度控 制降低了的工件和刀具损伤风险,特别是增强了流程安全性,这些使得生产效率和整个加工过程的经济效益得到了极大的提高。
ABB力控机器人,无需编程
图2 常规加工和技术方案的*重要原则与FC机加工的*重要原则的对比
在ABB这一技术基础上,Magna International公司的子公司ACTS研发出一种全新的车座检测系统。检测对象是在测试过程中会因载荷的 不同而发生变化的座椅(坐垫的夹持力和弹性逐步减弱)。常规配置的机器人在此处会出现重复作业,即沿着给定的动作轨迹行走,同时测量所获得的力。在每个循 环之后,它会把实际值与额定值进行均衡,并纠正轨迹,以用于下一个作业循环。由此连续几个作业循环,直至额定值重新达到为止。
而Frits(Force-controlled robotic intelligent test system力控机器人智能检测系统)的情况则不 同。机器人在移动载荷物的同时进行力的调节,从而使载荷物总是按照额定值进行加载。在连续试验中,载荷物非常准确也很接近现实地模拟人的重复上下车动作, 由此可得出在现实条件下的疲劳和磨损状况(图3)。
ABB力控机器人,无需编程
ABB机器人采用Frits来模拟入座时的复杂动作过程。所获得的数据可以对长期状态做出客观的表述
材料疲劳或材料失灵的测量值也可在“力-行程”曲线上反映出来,检测者可以得出有关座椅舒适度及其变化的可靠结论。由于有了自动路径学习功能,检测者在新 的测试或新的任务中,也会得益于很短的编程过程。新的测试系统的应用场合几乎不受限制,例如力矩调节的车辆元件在安装状态下(如座椅、车门、顶板、方向盘 等)的连续运行检测只是可能的众多检测项目中的一项。另一方面是对调节装置、开启装置和关闭装置(如门把手、档位和方向盘)的操作力的测量。适用于汽车领 域的方面,也可转用到航空、船舶或通用机器制造直至对电器设备活动部件的检测上。对此,检测系统会帮助用户对检测序列进行直接记录。另一方面,已编程完毕 的检测流程及其检测坐标可以一次性被存储,由此可以极大降低后续试验所需的换装和编程等费用。
更多ABB机器人技术支持请点击:http://abb_robots.gongboshi.com/
ABB机器人信息请点击:ABB机器人