
 在线客服
在线客服
 企业微信
企业微信









 [VIP第2年] 指数:4
[VIP第2年] 指数:4 通过认证
通过认证 

yaskawa安川工业机器人MA1440
简介
追求高生产性,新型机器人诞生;实现流程简化,在构造、性能、功能上的创新,提高了动作自由度和体型的小型紧凑化等。
主要参数
控制柜: DX200
| 机器人型号: | MA1440 |
| 自由度: | 6 |
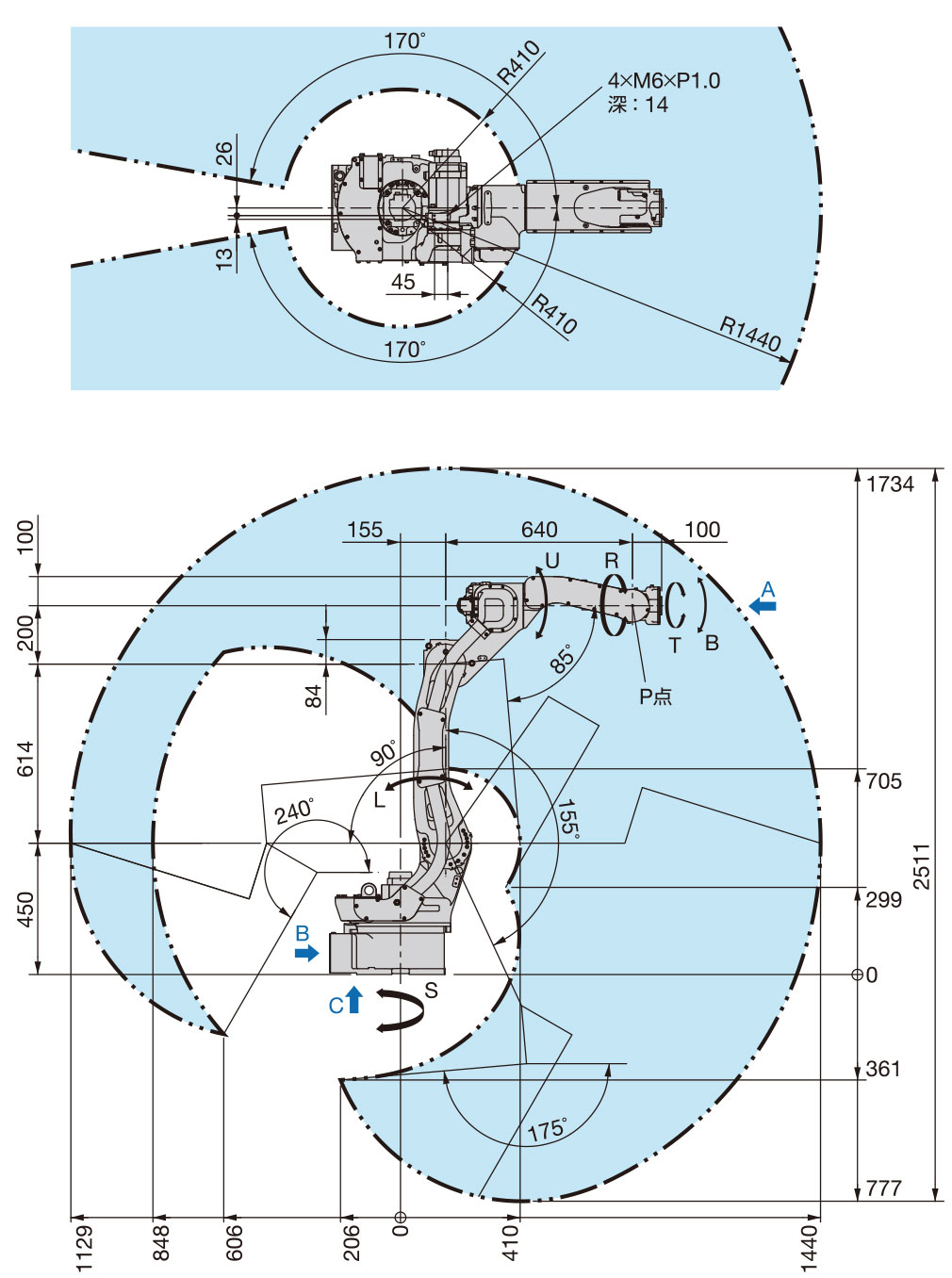
| 水平伸长度: | 1440mm |
| 可搬质量: | 6kg |
| 本体质量: | 130kg |
| 重复定位精度: | ±0.08mm |
| 安装方式: | 置地式、挂壁式、倒挂式 |
| 用途: | 弧焊、激光加工、搬运、其他 |
特点
可搭载各种伺服焊枪、传感器
通过高速动作,减少节拍
新型结构,提升易用性
|
动作范围 |
S轴(旋转) |
-170° ~ +170° |
|
|
L轴(下臂) |
-90° ~ +155° |
|
|
|
E轴(肘) |
- |
|
|
|
U轴(上臂) |
-175° ~ +240° |
|
|
|
R轴(手腕旋转) |
-150° ~ +150° |
|
|
|
B轴(手腕摆动) |
-135° ~ +90° |
|
|
|
T轴(手腕回转) |
-210° ~ +210° |
|
|
|
*大速度 |
S轴(旋转) |
230°/s |
|
|
L轴(下臂) |
200°/s |
|
|
|
E轴(肘) |
- |
|
|
|
U轴(上臂) |
230°/s |
|
|
|
R轴(手腕旋转) |
430°/s |
|
|
|
B轴(手腕摆动) |
430°/s |
|
|
|
T轴(手腕回转) |
630°/s |
|
|
|
容许力矩 |
R轴(手腕旋转) |
10.5N.m |
|
|
B轴(手腕摆动) |
10.5N.m |
|
|
|
T轴(手腕回转) |
3.2N.m |
|
|
|
容许惯性力矩 |
R轴(手腕旋转) |
0.28kg.m2 |
|
|
B轴(手腕摆动) |
0.26kg.m2 |
|
|
|
T轴(手腕回转) |
0.06kg.m2 |
|
|
|
本体质量 |
130kg |
|
|
|
电源容量*3 |
1.5kVA |
|
|
*1:F=置地式,W=挂壁式,C=倒挂式,S=支架式(挂壁式时,S轴的动作会有限制,请注意。)
*2:JIS B 8432为基准。
*3:因用途,动作模式而异。
*4:高精度用途时推荐负载在30KG以下。
点击了解更多安川机器人










