
 在线客服
在线客服
 企业微信
企业微信


7月炎炎夏日,工博士学堂的课程如期在上海市嘉定区的工博士埃福斯基地开课了。
讲师依旧由安全问题为主题开始讲课。先是着重的介绍了ABB机器人的各项参数指标。然后由浅入深的从基本操作开始讲解ABB机器人的操作。
ABB工业机器人本体有小型机器人(5kg-60kg),包含了IRB140,IRB1410,IRB1600,IRB1600ID,IRB2400,IRB2400L,IRB4400,IRB4450S等型号。
大型机器人(125kg-630kg),包含了IRB6620,IRB6640,IRB6650S,IRB6660和IRB7600等型号。
ABB工业机器人的运动方式包括:单轴运动、线性运动和重定位运动。今天这篇文章,我们以ABB IRB2600为例,介绍下什么是单轴运动,重定向运动和线性运动。
我们知道,IRB2600有六个轴。所谓“单轴运动”,就是用示教器来控制机器人的某一个轴单独进行运动。单轴运动的控制必须在手动模式下进行。
下面来介绍下单轴运动的控制方法。
首先,将控制柜上模式选择开关转到手动限速模式。
然后在示教器上点击【ABB】主菜单,在其子菜单中,选择【单轴运动(Jogging)】,如下图:

在【单轴运动(Jogging)】页面中,选择【运动模式(Motion mode)】,可以对运动模式进行选择,如下图:
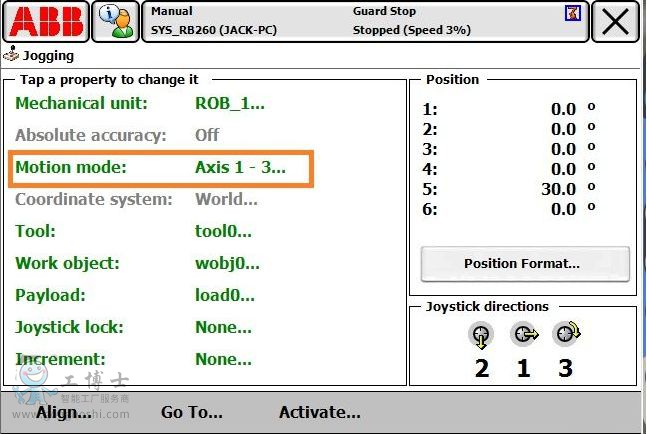

可以看到,IRB2600支持的运动模式包括:轴1-3的单轴运动(Axis1-3)、轴4-6的单轴运动(Axis4-6)、线性运动(Linear)及重定位运动(Reorient)。
这里我们选择“轴1-3的单轴运动(Axis1-3)”,点击“OK”确认。
在示教器的右下角会出现摇杆运动方向的提示。当向下移动摇杆时,可以控制轴2的向前运动;当向上移动摇杆时,可以控制轴2向后运动。
轴1的单轴运动可以通过左右移动遥杆来实现:向左移动遥杆机器人向左运动,向右移动遥杆机器人向右运动;
轴3的单轴运动可以通过旋转遥杆来实现:逆时针旋转遥杆使机器人抬起手臂,顺时针旋转遥杆能让机器人放下手臂;
上面介绍的是轴1-3的单轴运动,如果要控制轴4-6的运动,需要在运动方式中选择“轴4-6的单轴运动(Axis4-6)”,如下图:

当你选择轴4-6(Axis4-6)的单轴运动控制时,同样根据示教器右下角的提示,通过左右移动、上下移动和旋转遥杆来实现对不同的轴的控制。
重定位运动,即是机器人TCP位置不变,机器人工具沿座标轴转动,改变姿态。(重定位运动时,必须选择工具坐标)
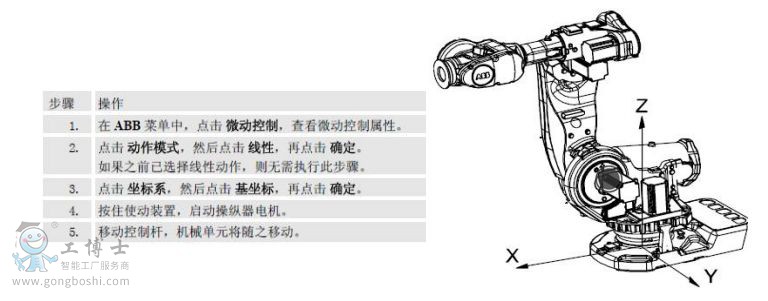
线性运动是指机器人工具姿态不变,机器人TCP沿坐标轴线性移动。其中线性运动的运动方向分为:大地坐标,基坐标,工具坐标和工件坐标。
线性运动:基坐标
当需要将可预测的运动轻而易举地转化为控制杆运动时,可以在基坐标系中进行微动控制。
在许多情况下,基坐标系是使用最为方便的一种坐标系,因为它对工具、工件或其它机械单元没有依赖性。
线性运动:大地坐标
何时使用:例如,有两个机器人,一个安装于地面,一个倒置。代表团机器人的基坐标系也将上下颠倒。
如果在倒置机器人的基坐标系中进行微动控制,则很难预测移动情况。此时可选择共享大地坐标系。

线性运动:工件坐标
何时使用:例如,您打算确定一系列孔的位置,以便沿着工件边缘钻孔。
您打算在工件箱的两面隔板之问焊接。

好了,本篇的机器人单轴运动和线性运动就介绍到这里。具体的培训内容还需大伙踊跃报名,亲自参加来体会。
本期学员合影






